Bloch sphere rotations: how to transform qubits
We have seen that the Bloch sphere is clear way of representing the state of a qubit short of a global phase and showed the operators implementing rotations of the Bloch vector, allowing to move between the states of a qubit.
Bloch sphere rotation
Rotations implemented by Pauli operators
Let’s now prove these equations: we first need a preliminary result preliminary result
Proposition
With this result we can no verify that the three operators written above actually perform rotations around the x, y and z axis \begin{equation} \hat{R}_x(\theta) = e^{-i \frac{\theta}{2}\hat{\sigma}_x} = \text{cos}\frac{\theta}{2}\hat{I} -i \text{sin}\frac{\theta}{2}\hat{X} = \begin{pmatrix} \text{cos}\frac{\theta}{2} & - \text{i sin}\frac{\theta}{2} \\ - \text{i sin}\frac{\theta}{2} & \text{cos}\frac{\theta}{2} \end{pmatrix}\\ \hat{R}_y(\theta) = e^{-i \frac{\theta}{2}\hat{\sigma}_y} = \text{cos}\frac{\theta}{2}\hat{I} -i \text{sin}\frac{\theta}{2}\hat{Y} = \begin{pmatrix} \text{cos}\frac{\theta}{2} & - \text{sin}\frac{\theta}{2} \\ \text{sin}\frac{\theta}{2} & \text{cos}\frac{\theta}{2} \end{pmatrix}\\ \hat{R}_z(\theta) = e^{-i \frac{\theta}{2}\hat{\sigma}_z} = \text{cos}\frac{\theta}{2}\hat{I} -i \text{sin}\frac{\theta}{2}\hat{Z} = \begin{pmatrix} e^{-i \frac{\theta}{2}} & 0 \\ 0 & e^{i \frac{\theta}{2}} \end{pmatrix} \end{equation} it's clear from their definition that these operators are unitary, namely $\hat{R}^{-1}_{x, y, z}(\theta) = \hat{R}^{\dagger}_{x, y, z}(\theta)$
Let's now prove that these operators actually implement rotations around the respective axes. For this, we need some preliminary results first
Useful equations
these can be obtained easily by simply using the definitions provided before
Let’s now use these equations to prove that the three operators provided above do actually implement rotations of the Bloch vector around the respective axes
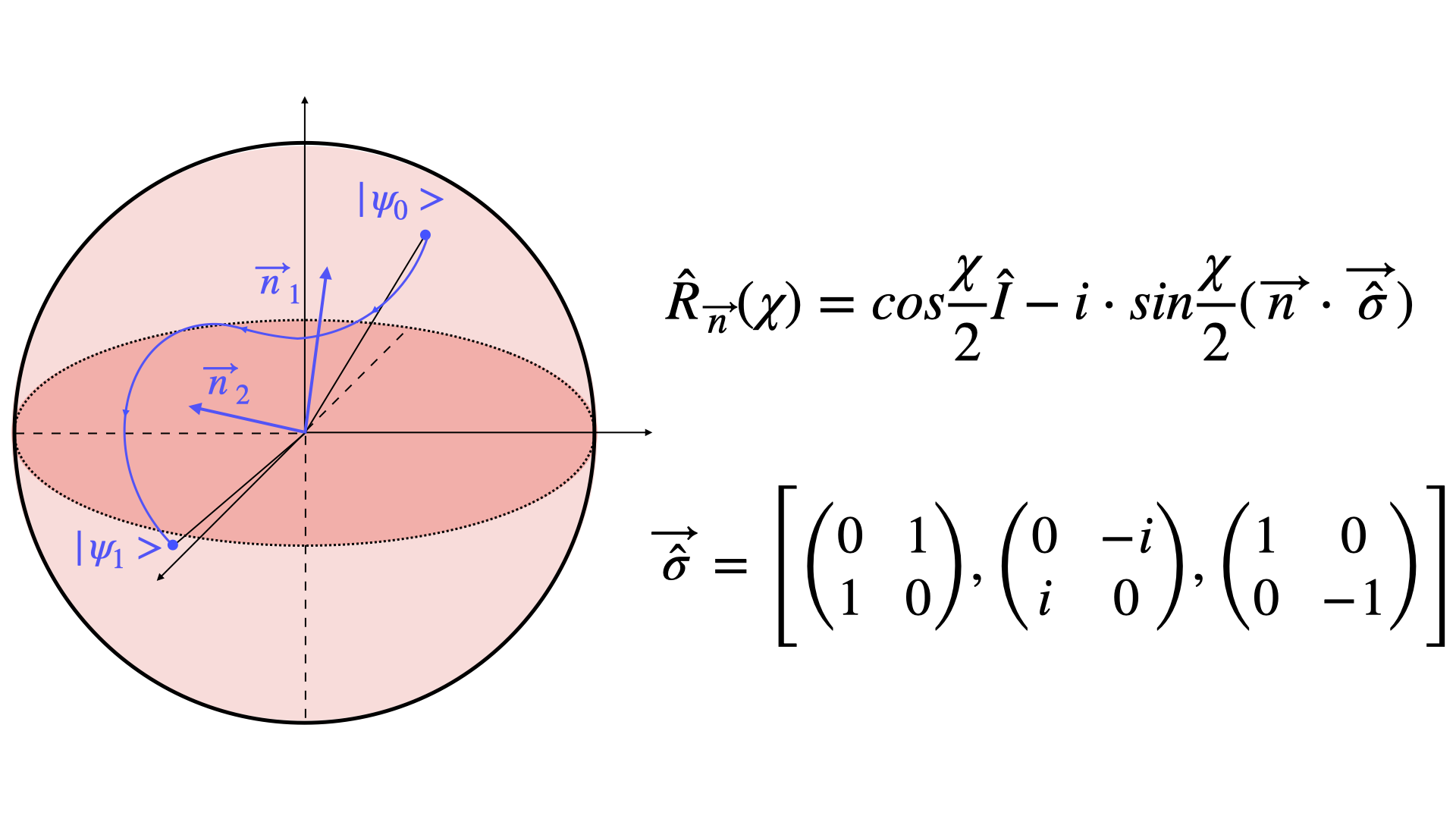
Rotations around an arbitrary axis
Rotation around an arbitrary axis
Let’s now utilize these transformations to compute the rotation of the Bloch vector around an arbitrary axis.
which provides a formula for the most general rotation of the Bloch vector.
Bibliography
[1] Nielsen, M.A. and Chuang, I., 2002. Quantum computation and quantum information.